Когда дело касается электродвигателей, возникают два неизбежных требования: интеграция силовой электроники с широкой запрещенной зоной и необходимость в высокоточных методах управления двигателем. С одной стороны, по мере развития производства 200-миллиметровых пластин на основе SiC и приближения к ценовому паритету с кремнием постепенная замена кремния в силовой электронике полупроводниками с широкой запрещенной зоной становится все более очевидной.

С другой стороны, для управления тяговыми электродвигателями часто выбирают полевое управление (FOC) или векторное управление, когда требуется высочайшая степень точности подачи крутящего момента. Однако часто не изучается влияние системы полевого управления, основанной на инверторах с широкой запрещенной зоной. В данной статье мы попытаемся обсудить влияние использования инверторов на основе SiC и GaN (литература по интеграции GaN-инверторов в системы полевого управления ограничена) на управление двигателями в полевых условиях.
Обоснование векторного управления
Синхронные двигатели с постоянными магнитами (PMSM), обычно используемые в тяге на электромобилях, используют три основных метода коммутации:
- Трапециевидная коммутация: она одновременно подает питание на две фазы и предназначена для двигателей с трапециевидной обратной ЭДС. Результатом является низкая стоимость и высокий крутящий момент. Тем не менее, мы наблюдаем колебания крутящего момента на 15-30%, слышимый шум и плохое управление на низких оборотах из-за резких переходов.
- Синусоидальная коммутация: это усовершенствование трапециевидного метода, поскольку он подает плавные синусоидальные волны на все три фазы (со сдвигом по фазе на 120°), уменьшая пульсации до 5-10%. Однако его динамические характеристики ограничены требованиями к точной обратной связи по положению. Синусоидальной коммутации также не хватает независимой оптимизации крутящего момента.
- Коммутация полевого управления: Хотя по сути она аналогична синусоидальной коммутации, FOC разделяет токовые контуры для Q- и D- крутящих моментов и помогает независимо управлять крутящим моментом и потоком намагничивания.
Многочисленные недостатки точности при трапециевидной и синусоидальной коммутации приводят нас к коммутации FOC.
Как работает полевое управление?
Пользователь управляет контуром Q-крутящего момента с помощью сервоконтроллера, а контур D-крутящего момента отключается путем установки входного значения на ноль. Все это работает путем преобразования векторизованного фазового угла в систему отсчета D и Q без привязки и обратно, для чего мы используем преобразования Парка и Кларка.
Преобразование Кларка проецирует трехфазные величины в стационарную систему отсчета:
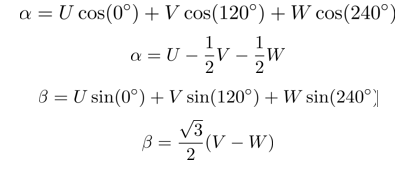
Где ⍺ является компонентом по стационарному ⍺-оси (выравнивание фазы ось U), ꞵ является компонентом по стационарному ꞵ-оси (перпендикулярно ⍺-оси), и ⍺ꞵ рама фиксируется в пространстве (невращающейся системе отсчета), как показано на рис. 1.
Рис. 1: Системы отсчета при преобразовании трехфазного переменного тока в систему, подобную системе постоянного тока – преобразование Кларка
За этим следует преобразование Парка, которое преобразует неподвижные компоненты во вращающуюся систему отсчета:
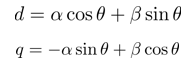
где d – составляющая прямой оси (выровненная с вращающейся осью отсчета), q – составляющая квадратурной оси (ортогональная оси d), а θ – электрический угол вращающейся системы отсчета (rad).
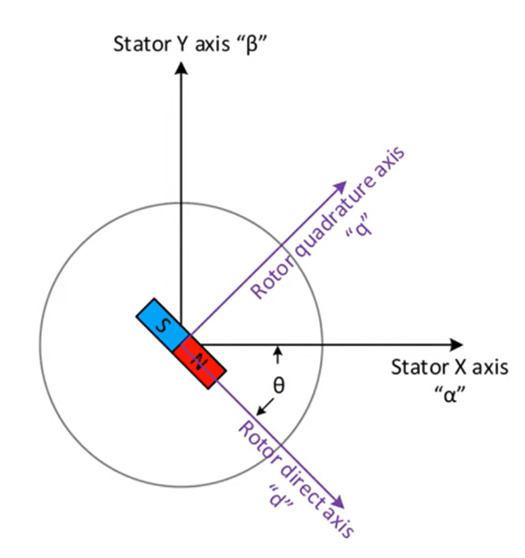
Рис. 2: Система отсчета для преобразования Парка.
Значение типов θ и FOC
Векторное управление включает в себя выравнивание магнитного поля статора перпендикулярно постоянному магниту ротора в двигателе. Обратите внимание, что для двигателя PMSM θ, угол магнитного потока ротора, соответствует электрическому положению ротора. θ – это переменная механического состояния ротора, в то время как контроллер непосредственно измеряет только электрические величины, такие как напряжения и токи статора. Следовательно, она должна быть определена; это приводит к разделению FOC на два типа. Если θ измеряется с помощью преобразователя, оптического энкодера или датчика эффекта Холла на роторе, фокусировка выполняется на основе датчика/напрямую. Если θ определяется без физического датчика, то это бессенсорное/непрямое полевое управление.
Бессенсорное полевое управление работает по принципу использования обратной ЭДС/магнитного потока, генерируемого магнитами ротора, которые обнаруживаются в обмотках статора. Точный алгоритм наблюдения, например, алгоритм наблюдения в скользящем режиме, может затем сравнить измеренные токи и напряжения с моделью двигателя. Фаза обратной ЭДС извлекается для вычисления θ, которая затем преобразуется в преобразования Кларка и Парка, как показано выше.
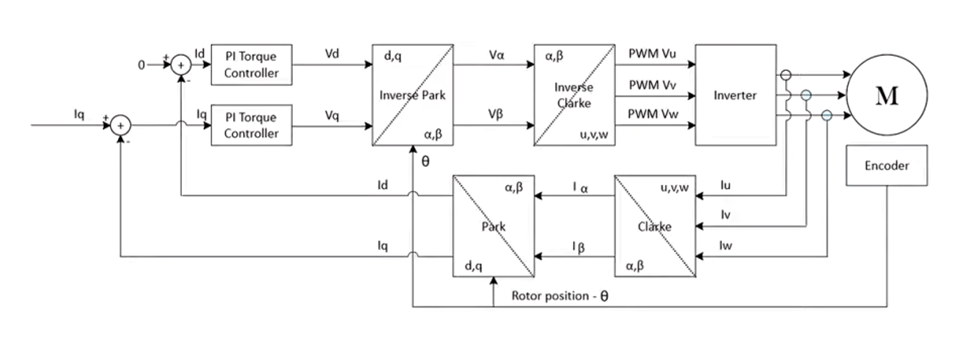
Рис. 3: Структурная схема FOC без датчиков
Определить θ проще
Обратите внимание, что, хотя при измерении θ с помощью датчика могут возникать ошибки калибровки, получение его значения является простым и не зависит от показателей тока и напряжения (и связанных с ними ошибок) при векторном управлении на основе датчика.
Аналогичным образом, пульсации крутящего момента, вызванные искажением напряжения, здесь в значительной степени сдерживаются – физический датчик выдает θ независимо от электрических величин двигателя, поэтому, несмотря на гармонические искажения в выходном напряжении, преобразование координат выполняется с чистым, незагрязненным углом. Следовательно, пульсация крутящего момента существует, но она не отражается на оценке положения и сама по себе ухудшается.
Контур обратной связи снижают точность
С другой стороны, колебания напряжения непосредственно влияют на колебания крутящего момента в системе без датчиков. Связь (между d и q) является двунаправленной и самоусиливающейся. Алгоритм наблюдения восстанавливает обратную ЭДС – следовательно, θ– по измеренным фазным токам. Если пульсации напряжения не отфильтрованы перед восстановлением, они накладываются на основную составляющую тока и воспринимаются наблюдателем как колебания сигнала обратной ЭДС. Это приводит к появлению пульсаций на расчетном θ.
Когда в преобразователь стояночного хода подается ошибочное значение θ, оси d-q не совпадают с установившимся значением постоянного тока, а колеблются относительно истинного угла поворота ротора. Это означает, что Iq – компонент, создающий крутящий момент, - сам колеблется. Изменяющаяся команда Iq напрямую приводит к изменению крутящего момента на выходе, поскольку электромагнитный момент в PMSM пропорционален Iq. Таким образом, пульсации крутящего момента усиливаются контуром обратной связи через алгоритм наблюдения, поскольку те же пульсации, которые искажают ток, также искажают θ, используемые для интерпретации этого напряжения.
Были предприняты инженерные усилия по разработке фильтров для устранения этих ошибок при измерении напряжения, включая фильтры нижних частот, фильтры Калмана и их расширенные версии и т.д. Конечно, существуют компромиссы: фазовая задержка, подавление смещения по постоянному току или динамический отклик – это лишь некоторые из многих. Любой подход к устранению этих погрешностей напряжения, основанный на фильтрах, заключается в последующей коррекции.
Теперь, если инверторы оснащены, скажем, SiC-МОП-транзисторами, которые обеспечивают более высокие частоты переключения, величина пульсаций основного тока уменьшается, что ослабляет эту петлю обратной связи и обеспечивает значительно более плавный крутящий момент.
Широкая запрещенная зона может сглаживать колебания крутящего момента
Аналогичным образом, GaN, в частности, обеспечивает более высокую подвижность электронов (2000 см2/Vs) по сравнению с Si (300 см2/Vs); он обеспечивает частоту ШИМ >50 кГц, что имеет решающее значение для точной пропускной способности токового контура Id/Iq в FOC. Более высокая частота переключения дает множество преимуществ. А именно, уменьшает размер фильтра и пульсации на выходе. Это, в свою очередь, позволяет повысить КПД до 98-99% и удельную мощность более чем до 100 кВт/л. Более быстрый электронный отклик сокращает время переключения (например, время нарастания/спада составляет 10-50 нс по сравнению со 100-500 нс в Si).
Таким образом, формы сигналов напряжения становятся более четкими из-за уменьшения пульсаций тока (на 50-70%). Это улучшает оценку обратной ЭДС и точность определения угла поворота ротора при бесконтактной фокусировке с помощью наблюдателей или каналов PLL, достигая погрешности <1° на низких скоростях.
Тепловые свойства SiC подходят для использования без датчиков.
Кроме того, более общим преимуществом таких материалов, как SiC, является их тепловая эффективность. Теплопроводность SiC примерно в 4-5 раз выше, чем у кремния, что обеспечивает гораздо более эффективное рассеивание тепла на уровне устройства. Устройства с широкой запрещенной зоной также могут надежно выдерживать температуру соединения до 175-200 °C, уменьшая размер радиатора на 30-50%. Несмотря на то, что компактность и долговечность оборудования при таких тепловых свойствах важны, переключение полупроводниковых приборов в зависимости от температуры более актуально для бесконтактного векторного управления.
На переключение влияет влияние температуры
Остаточные токи затрудняют переключение в Si
Кремниевые БТИЗ (биполярные транзисторы с изолированным затвором) имеют биполярную модуляцию проводимости: неосновные носители заряда намеренно вводятся в область дрейфа во время проводимости, чтобы уменьшить потери на сопротивление. Когда транзистор выключен, этим носителям требуется время для рекомбинации и рассеяния, что увеличивает потери при переключении и время работы. Более того, это время рекомбинации не является фиксированным – оно зависит от температуры перехода. По мере повышения температуры перехода увеличивается срок службы неосновных носителей заряда, растет остаточный ток и возрастают потери при переключении.
Следовательно, при использовании БТИЗ на основе Si необходимо либо снизить частоту переключения, либо увеличить время простоя. Оба эти решения напрямую связаны с опорными напряжениями при бесконтактном векторном управлении. Пониженная частота переключения увеличивает отношение времени простоя к периоду (Td/Ts), усиливая погрешности напряжения пятой и седьмой ошибок синусоидального напряжения в α-β стационарном кадре, величина которых определяется именно этим соотношением. Увеличенное время простоя независимо увеличивает погрешность напряжения, поскольку:
ΔVdt=−Vdc⋅(Td/Ts)⋅sin(i)
Это снова искажает определение, но на этот раз это происходит постепенно в течение рабочего цикла по мере нагрева инвертора.
Скорость отключения SiC-транзисторов
С другой стороны, SiC-МОП-транзисторы являются однополярными устройствами с прибором на основных носителях. Поскольку во время проводимости не происходит инжекции неосновных носителей заряда, ни один из них не должен рекомбинироваться при выключении – переключающий переход определяется схемой привода затвора и геометрией устройства, которые являются фиксированными и нечувствительными к температуре. Следовательно, потери при отключении ниже по сравнению с БТИЗ из-за полного отсутствия остаточного тока в SiC-МОП-транзисторах.
Такая «независимость» SiC от температуры имеет количественные последствия для целостности формы сигнала напряжения. Поскольку частота выключения dVDS/dt (или просто скорость переключения при выключении) в SiC-МОП-транзисторах не является линейной функцией температуры, в диапазоне от 25°C до 175°C (для МОП-транзисторов напряжением 10 кВ) значение частоты выключения dVDS/dt остается приблизительно постоянным при 10,44 В/нс, по сравнению с БТИЗ на основе Si, которые имеют отрицательный температурный коэффициент и уменьшаются с повышением температуры. Следовательно, при использовании инверторов на основе SiC наблюдатель потока может быть настроен на гораздо более предсказуемые пульсации напряжения (из-за температуры), чем при использовании инверторов на основе Si.
При этом важно отметить, что скорость включения dVDS/dt по-прежнему слабо зависит от температуры соединения устройств. Однако в литературе, посвященной температурной зависимости скорости переключения при включении, остается неоднозначным ее влияние на форму сигнала напряжения. Существует также неопределенность в отношении прямого влияния этого явления на FOC без датчиков.
Высокая скорость переключения для бесконтактного векторного управления
Общий параметр dVDS/dt , или скорость переключения (выключение или включение), проливает свет на некоторые важные недостатки использования полупроводниковых МОП-транзисторов в инверторах. Из-за высокой скорости переключения процесс переключения полупроводникового МОП-транзистора в практической схеме чувствителен к паразитной емкости и характеризуется значительными перепадами тока и напряжения. Исследование показало, что превышение напряжения при включении dVDS может достигать 323%, в то время как превышение напряжения при включении в тестовой цепи достигает 21,56%. Эти превышения вызывают значительные колебания напряжения и тока.
Механизм здесь прост: быстрый di/dt во время переходного процесса переключения индуцирует напряжение:
![]()
через каждую паразитную индуктивность в контуре питания – индуктивность шины постоянного тока, индуктивность соединительного провода модуля и индуктивность цепи печатной платы между модулем и конденсаторами линии постоянного тока. Эти емкости ответственны за превышение напряжения. При бесконтактном векторном управлении эти превышения напряжения отображаются непосредственно на форме сигнала выходного напряжения инвертора в виде переходных скачков, которые отклоняются от заданного напряжения (затухающие колебания), поступая на вход устройства наблюдения за потоком напряжения в виде ложных искажений, а модель не имеет механизма, позволяющего отличить от реальной обратной ЭДС двигателя.
Остаточные токи были спасением для БТИЗ на основе Si
Однако стоит отметить, что остаточные токи, которые ухудшали форму сигнала напряжения по мере увеличения температуры перехода с течением времени, требовали определенного снижения напряжения, чтобы уменьшить превышение напряжения и затухающие колебания. Остаточный ток БТИЗ приводит к постепенному уменьшению тока, ограничивая значение di/dt в конце отключения. Но у полупроводниковых МОП-транзисторов на основе SiC нет остаточного тока. Величина перерегулирования и паразитных помех заметно выше. Резкий переход SiC при отключении приводит к более резкому падению тока, что означает более высокое значение di/dt при отключении.
Затухающие колебания, которые следуют за каждым переходным процессом переключения, сохраняется в течение промежутка времени, определяемого коэффициентом качества паразитной сети RLC (формируемой индуктивностью контура питания и выходной емкостью устройства). Из-за высоких значений dV/dt и di/dt полупроводниковых МОП-транзисторов взаимодействие с паразитными параметрами схемы приводит к очевидным колебаниям напряжения и тока. Перегрузки и помехи в цепи питания оказывают большое влияние на напряжение затвор-исток и увеличивают его нагрузку. Это явление часто ошибочно принимают за колебания второго порядка самого управляющего контура.
При высоких частотах переключения, поддерживаемых SiC, — от 50 до 100 кГц — интервал между последовательными переключениями может быть недостаточным для того, чтобы этот сигнал полностью затих до начала следующего перехода. Таким образом, бессенсорный алгоритм наблюдателя потока работает в электромагнитной среде, которая не характеризуется дискретными, четко разделенными волнами-помехами в каждый момент переключения. Вместо этого мы наблюдаем непрерывную, перекрывающуюся последовательность колебательных возмущений, которые повышают уровень порогов шума на протяжении всего рабочего цикла.
Оценка риска паразитного включения по напряжению
Помимо перегрузки и затухающих колебаний, высокое значение dV/dt при переключении SiC приводит к более коварному отказу. Это характерно для полумостовых инверторных конфигураций: паразитное включение или включение по методу Миллера. Большие значения dV/dt, вызванные затухающими колебаниями, могут вызывать токи в затворе через емкость CgD обратной связи (или Миллера). Это может привести к увеличению напряжения между затвором и источником и, в некоторых случаях, к паразитному включению МОП-транзистора. Это приводит к разрушительным импульсам тока. Когда включается переключатель высокого напряжения и напряжение на коммутационном узле быстро повышается, dV/dt соединяются через CgD с затвором переключателя низкого напряжения. Однако это происходит только в том случае, если напряжение на затворе, индуцированное эффектом Миллера, превышает пороговое напряжение Vth устройства на стороне низкого напряжения. Это приводит к кратковременному включению непреднамеренного канала проводимости, что приводит к возникновению паразитного импульса тока на выходе инвертора.
При бессенсорном векторном управлении паразитное включение приводит к скачку тока в фазе, которая отображается в аналого-цифровом преобразователе как истинный ток двигателя. Это искажает результаты измерений тока по оси d-q, на основе которых наблюдатель потока восстанавливает обратную ЭДС.
Высокое значение dV/dt оказывает многофакторное влияние на формы сигналов напряжения и тока; превышение напряжения, продолжительные гудки, повышенный уровень электромагнитных помех и риск паразитного включения – все это приводит к ошибкам оценки при работе FOC без датчиков.
При использовании инверторов на основе SiC конструкцию FOC без датчиков неизбежно необходимо изменить из-за предостережений, рассмотренных в данной статье. Обратите внимание, что мы рассмотрели теоретические последствия использования инверторов на основе SiC в системе электродвигателей, управляемых с помощью конструкции FOC без датчиков.






